A multi-robot system for autonomous and precision crop treatment.
- The CSIC’s RoboTeam4Crops project will make it possible to reduce the application of phytosanitary products by up to 90% through the use of drones and ground robots.
- The main objective is to transfer this technology to the agricultural sector through viable procedures in real crop scenarios and on a commercial scale.
Society is demanding a more efficient, safe and environmentally sustainable food production, which requires the development and transfer of new technologies in the agricultural field. Advances in aerial and terrestrial robotics, digitalization, intelligent implements, etc., can allow the optimization of the resources used (machinery, fertilizers, phytosanitary products, etc.) through the application of localized treatments adjusted to the real needs of each crop plot, following the principles of precision agriculture.
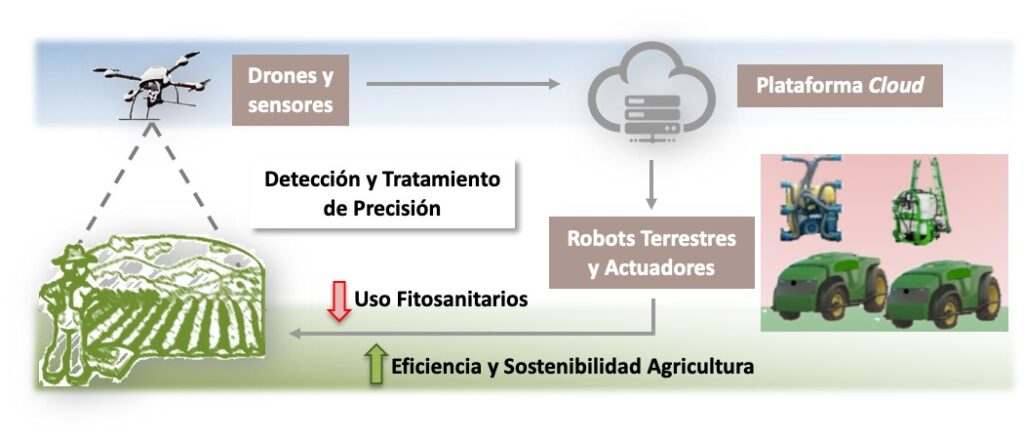
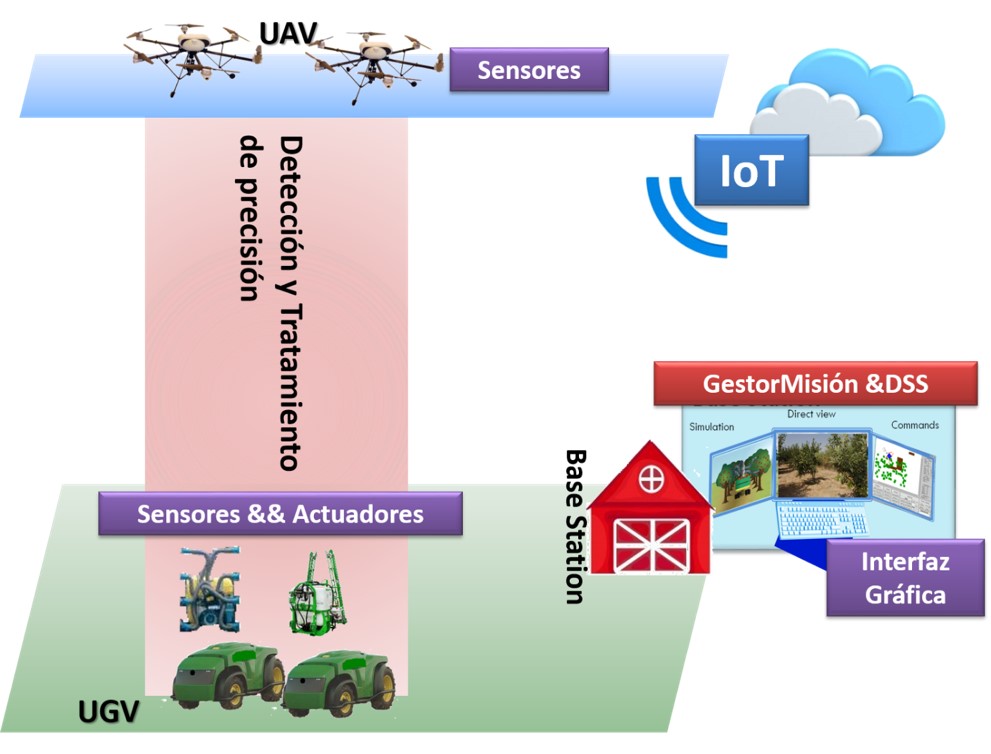
In this context, the RoboTeam4Crops project aims to valorize the results on crop inspection and characterization procedures and early weed detection methods using drones and ground platforms, and from this knowledge, to advance towards the integration of the technology used to obtain an autonomous multi-robot prototype that takes advantage of the coordination between aerial and ground equipment with the ultimate goal of improving the performance and precision of phytosanitary treatments in real crop scenarios (Figure 1).
The prototype will be integrated, at least, by a drone (UAV) and a ground robot (UGV), in addition to a set of perception, decision support and actuation systems, and will have two main functions: 1) inspection: monitoring of herbaceous and woody crops, and detection of treatment areas (with presence of weeds) and canopy volume, and 2) treatment: localized and specific application of phytosanitary products adjusted to the need of each crop and type of treatment (weed control and/or stump/tree spraying).
Inspection
Field monitoring and detection of treatment zones.

Analysis and prescription map
Image analysis and early detection of weeds.
Performance
Localized treatment application
The RoboTeam4Crops project will also include the scaling of the proposed prototype from experimental conditions to real agricultural scenarios by analyzing its technical and commercial viability, with the collaboration of robotics and agricultural services companies that have shown their interest in the results obtained.
The expected results of this project will mainly result in the improvement of phytosanitary treatments in both herbaceous crops (e.g. corn) and woody crops (e.g. vines), where it is estimated that the use of localized treatments could lead to a significant reduction in the application of herbicides, given that between 40-90% of the surface area of agricultural plots does not present weed infestations and, therefore, should not be treated.
With these savings figures, the impact of transferring the scientific and technical results of the RoboTeam4Crops project to the sectors involved is high. In addition to the economic and environmental benefits that the reduction in treatments will bring, this project will help to reduce the digital divide in the agricultural and rural areas, and will allow improving crop protection strategies without degrading the environment and, therefore, maintaining a balance between production and sustainability.